
ROPA - Radar Optical Piloted Aircraft
Kurzbeschreibung
Ausgangspunkt / Motivation
Es ist ersichtlich, dass unbemannte Luftfahrzeuge eine treibende Kraft an den Märkten werden, wobei vor allem Anwendungen mit erhöhtem Grad der Automatisierung und ohne Sichtverbindung über hohes Potential verfügen. Bislang sind keine luftfahrttauglichen Systeme zur Kollisionsvermeidung mit unkooperativen Objekten v.a. zur Anwendung für unbemannte Luftfahrzeuge erhältlich.
Verfügbare Technologien, Verfahren und Ansätze aus der bemannten Luftfahrt sind für unbemannte Luftfahrzeuge nur bedingt anwendbar, wodurch derzeit keine zufriedenstellenden Lösungen verfügbar sind. Dieses Projekt erforscht dabei die nach aktuellen Stand der Technik erfolgversprechendsten Technologien elektro-optischer und Radar Sensorik.
Ziele
- Maschinelles Lernen zur Kollisionsvermeidung
- Erforschung der Ausweichstrategie und Ausgabe der Ausweichempfehlungen
- Einbindung von kooperativen System zur Steigerung der Robustheit
- Integration der Sensorik zu Evaluierungszwecke
Inhalt
Unbemannte Luftfahrzeuge gewinnen in den letzten Jahren zunehmend an Bedeutung, wie die Marktentwicklung aus dem letzten Jahrzehnt zeigt 1. V.a. Anwendungen ohne Sichtverbindung des Piloten zum Luftfahrzeug bzw. Luftfahrzeuge mit höherem Grad der Automatisierung in Hinblick auf Klasse 2 nach Luftfahrtgesetz 2,3 benötigen Technologie zur Gewährleistung der Sicherheit im Flug.
Bisher war die menschliche Komponente in der bemannten Luftfahrt das primäre Mittel zur Vermeidung von Kollisionen. Bei unbemannten Luftfahrzeugen kann auf diese zentrale Komponente, den Piloten, nicht zurückgegriffen werden, weshalb technische Mittel erforderlich sind, die diese Aufgabe wahrnehmen.
Bislang wurde zumeist von behördlicher Seite von einem gleichwertigen Sicherheitsniveau (engl. equivalent level of safety) gesprochen, da behördliche Regulierungen nicht verfügbar waren. Im folgenden Stand der Technik werden aktuelle behördliche Regulierungen, relevante Produkte und Verfahren, die sich bereits am Markt befinden sowie relevante Technologien, aufgezeigt.
Methodik / Vorgehensweise
- Bei kooperativen, aktiven Systemen werden folgende Technologien eingesetzt:
TCAS, TAS, FLARM, Radio/ATC - Bei kooperativen, passiven Systemen werden folgende Technologien eingesetzt:
ADS-B, TCAD - Bei unkooperativen, aktiven Systemen werden folgnde Technologien eingesetzt:
LIDAR, RADAR - Bei unkooperativen, passiven Systemen werden folgende Technologien eingesetzt:
Elektrooptische Sensoren, Thermisch- Infrarote Sensoren, Akustische Sensoren
Erwartete Ergebnisse
Die Kombination dieser unterschiedlichen Sensormodalitäten bietet das Potential unkooperative Objekte im Luftraum robust erkennen zu können. Zusätzlich soll die Sensorik mit bestehenden kooperativen Technologien wie Automatic Dependent Surveillance - Broadcast (ADS-B) und Traffic Advisory System (TAS) fusioniert werden.
Diese robuste Detektion stellt die Grundlage für die Ausweichstrategie und Ausweichempfehlung zur Vermeidung einer potentiellen Kollision dar, welche sich auf die letztmögliche Konfliktphase fokussiert, bei der die prozedurale und Separationsphase bereits wirkungslos sind und das umgehende Einleiten eines Flugmanövers die letzte Möglichkeit einer Kollisionsvermeidung ist.
Als Ausweichstrategie wird ein regelbasierter Ansatz mit geometrischen Überlegungen auf Basis der Freiheitsgrade eines generischen parametrisierbaren Luftfahrzeugs weiterentwickelt. Ein besonderer Fokus liegt dabei auf der Schaffung eines technologischen Mehrwerts der eingesetzten Technologien in Bezug zum Stand der Technik, sowie der Schaffung eines Betriebsleitfadens zur Anwendung der Technologie und als Entscheidungsgrundlage für eine etwaige behördliche Regulierung.
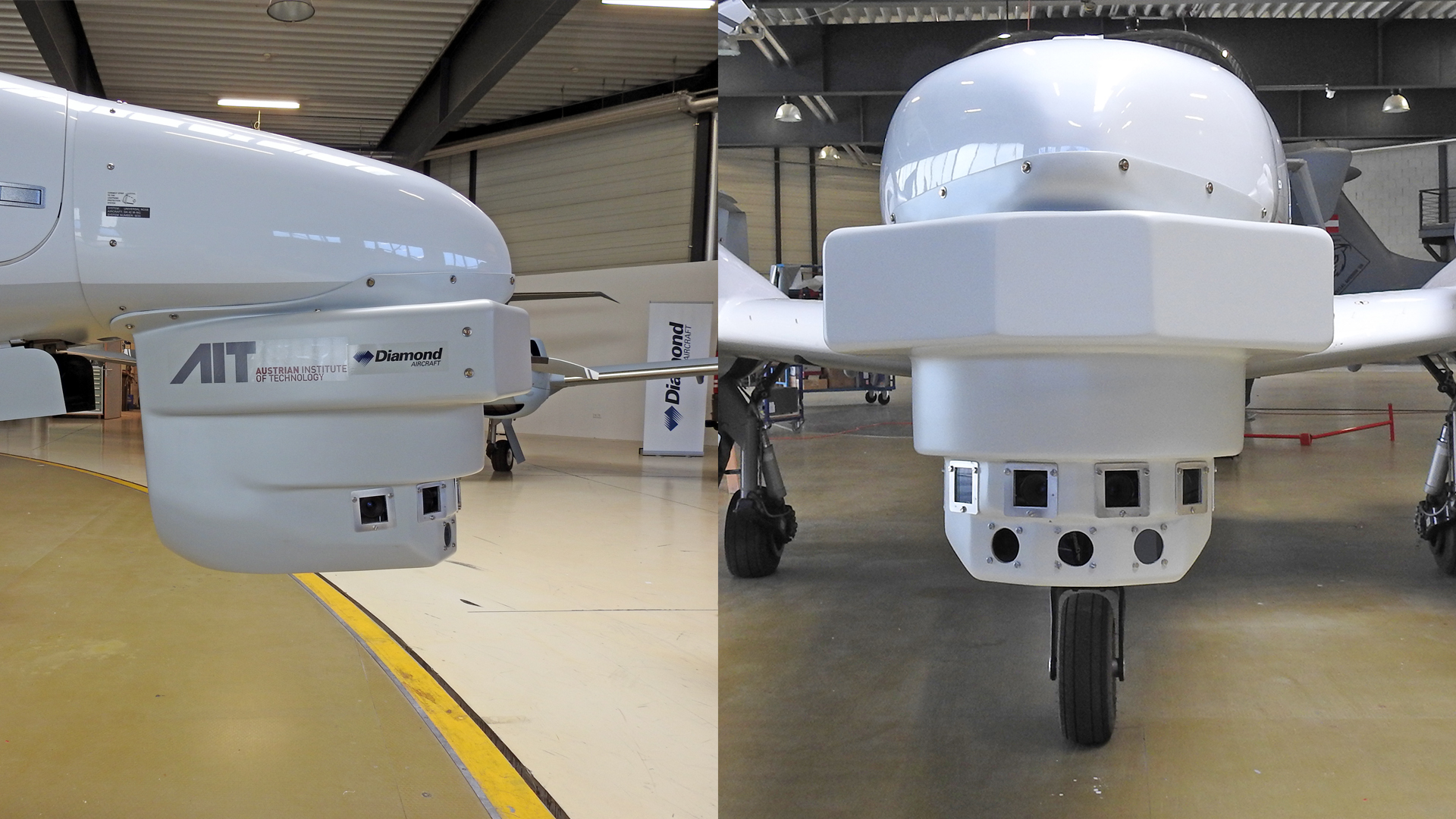
Die Ergebnisse werden in Form eines funktionalen Technologieträgers in ein Luftfahrzeug der EASA CS23 Kategorie integriert und anhand relevanter Szenarien gezeigt.
Projektbeteiligte
- AIT - Austrian Institute of Technology GmbH - Koordinator
- Diamond Aircraft Industries GmbH
- PIDSO - Propagation Ideas & Solutions GmbH
Förderprogramm: TAKE OFF