ROPA - Radar Optical Piloted Aircraft
Short Description
Motivation
It is now certain that unmanned aerial vehicles are becoming a driving force in the markets, with high potential in particular for applications with a high degree of automation and beyond the visual line of sight. To date, there are no aircraft collision avoidance systems available for non-cooperative aircraft, and especially unmanned aerial vehicles.
Available technologies, procedures and approaches in manned aviation are of limited use for unmanned aerial vehicles, and currently do not provide satisfactory solutions. This project investigates the most promising state of the art technologies of electro-optical and radar sensor technology.
Objectives
- Machine learning for collision avoidance
- Research into the collision avoidance strategy and issuing the resolution advisory
- Integration of cooperative system to increase robustness
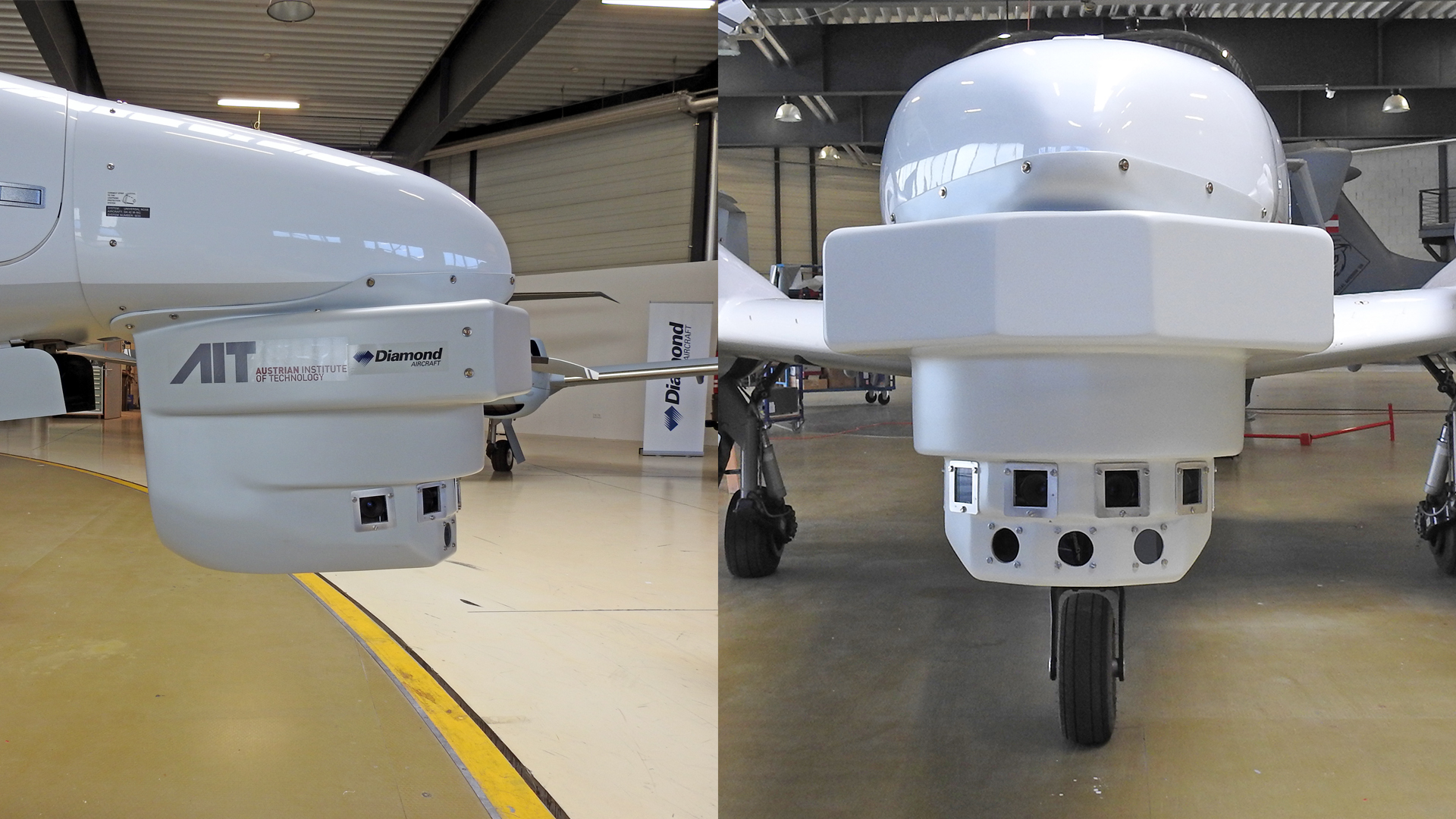
- Integration of sensors for evaluation purposes
Content
Unmanned aerial vehicles have become increasingly important in recent years, as the market trend of the past decade has shown. 1. It is especially in applications beyond the pilot's visual line of sight as well as those in aircraft with a high degree of automation with regard to Category 2 of the Aviation Law that require technology for ensuring flight safety. So far, the human component in manned aviation has been the primary means of avoiding collisions.
In unmanned aerial vehicles, this central component, the pilot, cannot be used, which requires the use of technical means to perform this task. Up to now, most authorities have identified an equivalent level of safety due to government regulations not being available. In the following state of the art, current government regulations, relevant products and procedures that are already on the market as well as relevant technologies are illustrated.
Methodology
- For cooperative, active systems, the following technologies are used:
TCAS, TAS, FLARM, radio/ATC - For cooperative, passive systems, the following technologies are used:
ADS-B, TCAD - For uncooperative, active systems, the following technologies are used:
LIDAR, RADAR - For uncooperative, passive systems, the following technologies are used:
Electro-optical sensors, thermal-infrared sensors, acoustic sensors
Expected results
The combination of these different sensor modalities offers the potential to robustly detect uncooperative objects in the airspace. In addition, the sensors are to be merged with existing cooperative technologies such as Automatic Dependent Surveillance - Broadcast (ADS-B) and Traffic Advisory System (TAS). This robust detection provides the basis for the collision avoidance strategy and resolution advisory to avoid a potential collision, which focuses on the last possible critical phase, where the procedural separation phases are already ineffective and immediate manoeuver initiation is the last possibility for collision avoidance.
As a collision avoidance strategy, a rule-based system with geometric considerations based on the degrees of freedom of a generic parameterisable aircraft is further developed. A particular focus is put on creating a technological added value of the technologies used with regard to the current state of the art, as well as creating guides for the application of this technology and a basis for any official regulation decision-making. The results will be integrated into an EASA CS23 category aircraft in the form of a functional test device and shown on the basis of relevant scenarios.
Project Partners
- AIT - Austrian Institute of Technology GmbH - Coordinator
- Diamond Aircraft Industries GmbH
- PIDSO - Propagation Ideas & Solutions GmbH
Funding program: TAKE OFF