
DEMONA - Demonstration of UAS Integration for VLL Airspace Operations
Kurzbeschreibung
Motivation
Die Integration von RPAS in den nicht abgegrenzten zivilen Luftraum folgt einer Roadmap der Europäischen Kommission. In einem ersten Schritt lag der Fokus auf der Ermöglichung des Flugbetriebs von (nach österreichischem Recht) Klasse-1-Fluggeräten im unmittelbaren Sichtbereich des Operators sowie unterhalb einer Mindestflughöhe (VLOS).
Erst in weiterer Folge soll eine Integration außerhalb der direkten Sichtweite sowie oberhalb der Mindestflughöhe erfolgen. Während für UAS bzw. RPAS der Klasse 1 ein Lufttüchtigkeits- und Betriebshinweis (LBTH 67) als Bewilligungsgrundlage vorliegt, werden UAS der Klasse 2 nach gegenwärtiger Gesetzeslage wie zivile Flugzeuge behandelt und erfordern zur Erlangung einer Typenzulassung eine Einbettung in luftfahrtbetriebliche Rahmenbedingungen.
Im Rahmen der Sondierung „Austrian Unmanned Aerial System for Civilian Missions" wurde der Technologie- und Forschungsbedarf erhoben, um UAS außerhalb der direkten Sichtverbindung zum Remote Pilot betreiben zu können. Der Projektvorschlag „DEMONA" zielt darauf ab, in diesen Themen einen Innovationssprung zu erzielen.
Ziele
- Entwicklung der Systemkomponente "Detect & Avoid" und Funktionsdemonstration
- Entwicklung der Systemkomponente "Navigationsmodul" sowie Geo-Fencing/Luftraumabgrenzung und Funktionsdemonstration mittels Galileo
- Design von Instrumenten-Procedures für Unbemannte Flugsysteme
- Integration einer Referenzarchitektur für UAS und Erprobungsbewilligung unter EASA-Regelwerk (SORA)
Inhalt
Das Konsortium verfolgte gemeinsam drei übergeordnete Ziele, die zu einer starken internationalen Sichtbarkeit der Forschung beitragen und auf Fachtagungen disseminiert werden sollen:
- Erarbeitung einer zulassungsfähigen Referenzarchitektur für leichte UAS der Klasse 2 und einer Referenzarchitektur für eine minimal ausgerüstete mobile Bodenkontrollstation
- Erstmalige Erprobung eines UAS Klasse 2 in Österreich in Luftraumklasse D (geplant war Klasse G). Erstmalige Demonstration eines Galileo-basierten UAS-Fluges
- Erarbeitung einer Knowledge Base in Bezug auf Instrumentenanflüge.
Methodik
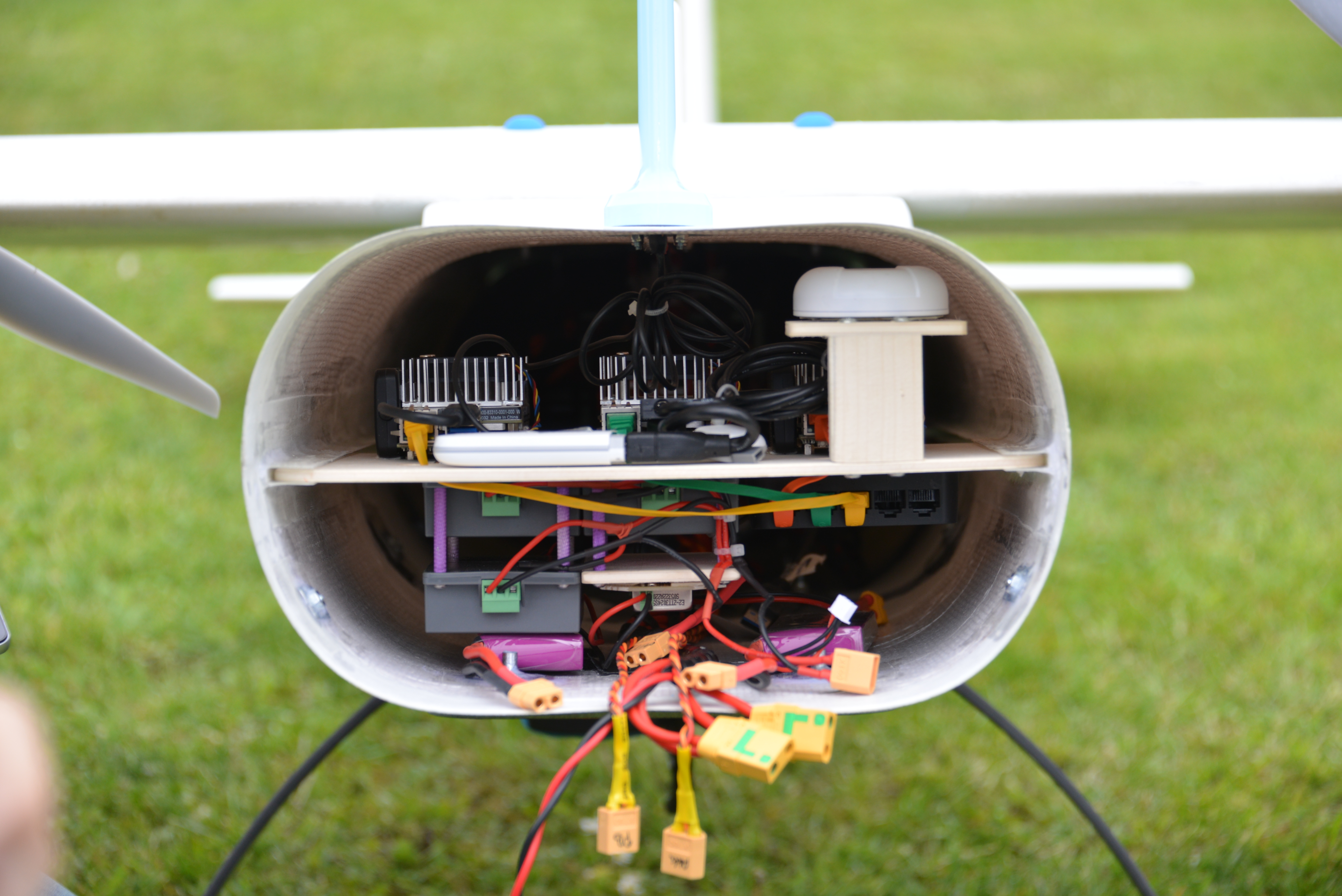
Die Elemente der UAS-Referenzarchitektur (Airframe des Flugsystems, Energieversorgung, Bodenstation/Flugsteuerung mit Telemetrie, Navigations-Modul mit Geo-Fencing, Detect &Avoid-Modul, Rettungsssystem) wurden schrittweise erarbeitet, im Labormaßstab als auch im Flugversuch erprobt und integriert. Die Erprobungsbewilligung des Systems wurde auf Basis einer spezifischen Riskoanalyse erlangt, der Airframe anhand der Spezifikationen für Flug-Großmodelle zugelassen. Die Instrumentenverfahren wurden anhand der Rahmenbedingungen des Flughafens Klagenfurt ermittelt und erprobt.
Erwartete Resultate
Zum Zeitpunkt des Projektstartes waren Österreich keine zugelassenen zivilen UAS der Klasse 2 bekannt. Eine erstmalige Flugerprobung einer solchen Kategorie (bzw. der "Specific"-Kategorie nach dem mittlerweile in Kraft getreten EU-Regularium) im Luftraum Klasse "D" stellt daher einen nationalen Benchmark und einen international beachteten Meilenstein am Weg zur Integration unbemannter Flugsysteme in den Luftraum dar.
Ergebnis zu Projektende
Die übergeordneten Projektziele wurden durchweg erreicht. Im Vergleich zur geplanten Erprobung in Luftraum Klasse "G" erfolgte diese unter den wesentlich strengeren anforderungen in der Kontrollzone eines internationalen Flughafens (Klasse "D").
Bildergalerie




Projektbeteiligte
- FH JOANNEUM GmbH - Koordinator
- AIT - Austrian Institute of Technology GmbH
- Austro Control GmbH
- Drone Rescue Systems
- Igaspin GmbH
- TCA - TeleConsult Austria GmbH
- TU Graz, Institut für Geodäsie
Förderprogramm: TAKE OFF